Recruiting — Summer 2026 Internships
Swabir
M. Bwana
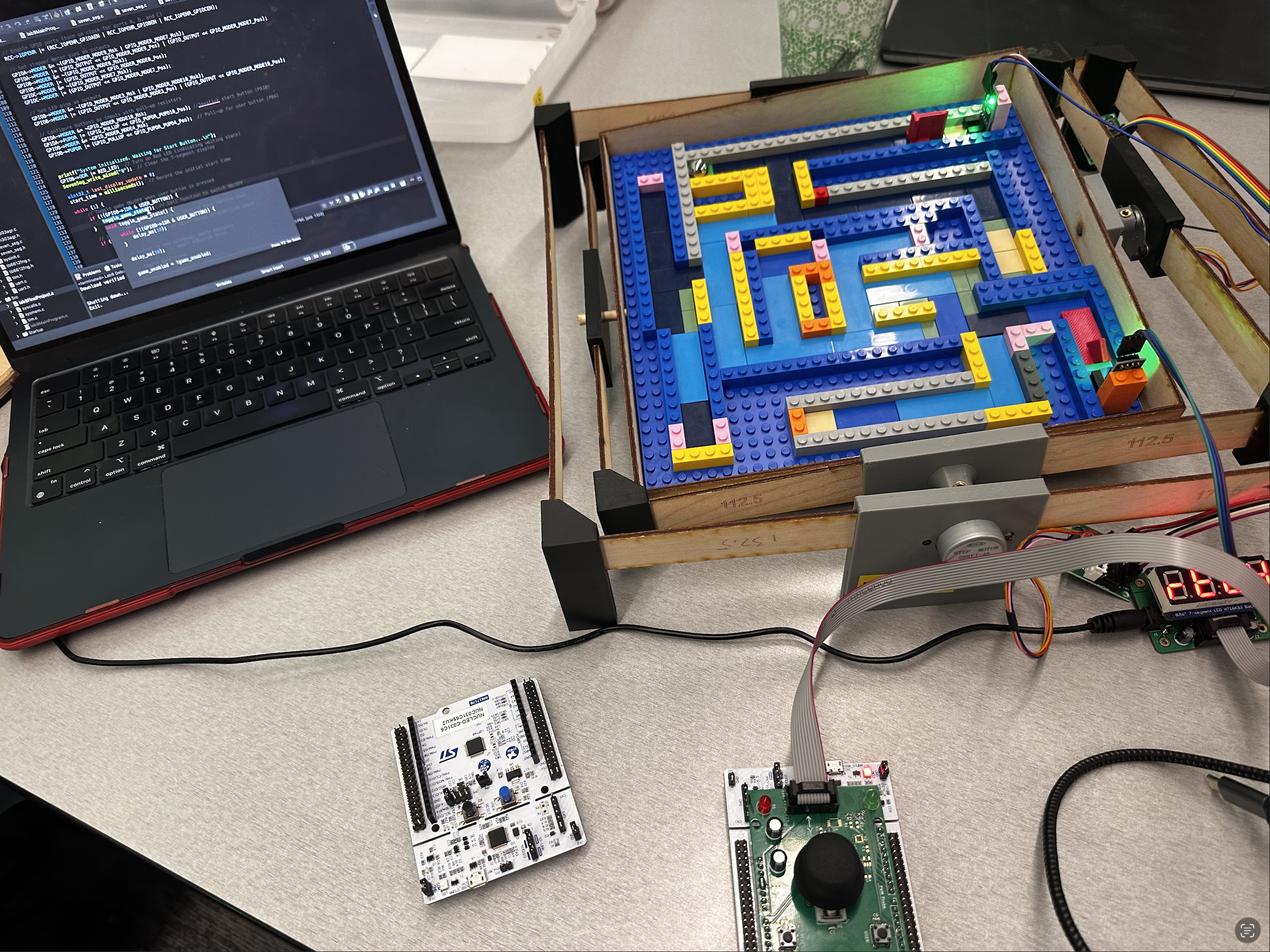
I write software and embedded firmware. Some weeks that means shipping a full-stack web platform with frequent production releases; other weeks it's writing interrupt-driven C on an ARM microcontroller and profiling latency down to the microsecond. Computer engineer at Dartmouth, currently recruiting for Summer 2026.
15+
Projects Shipped
10+
Languages & Frameworks
1
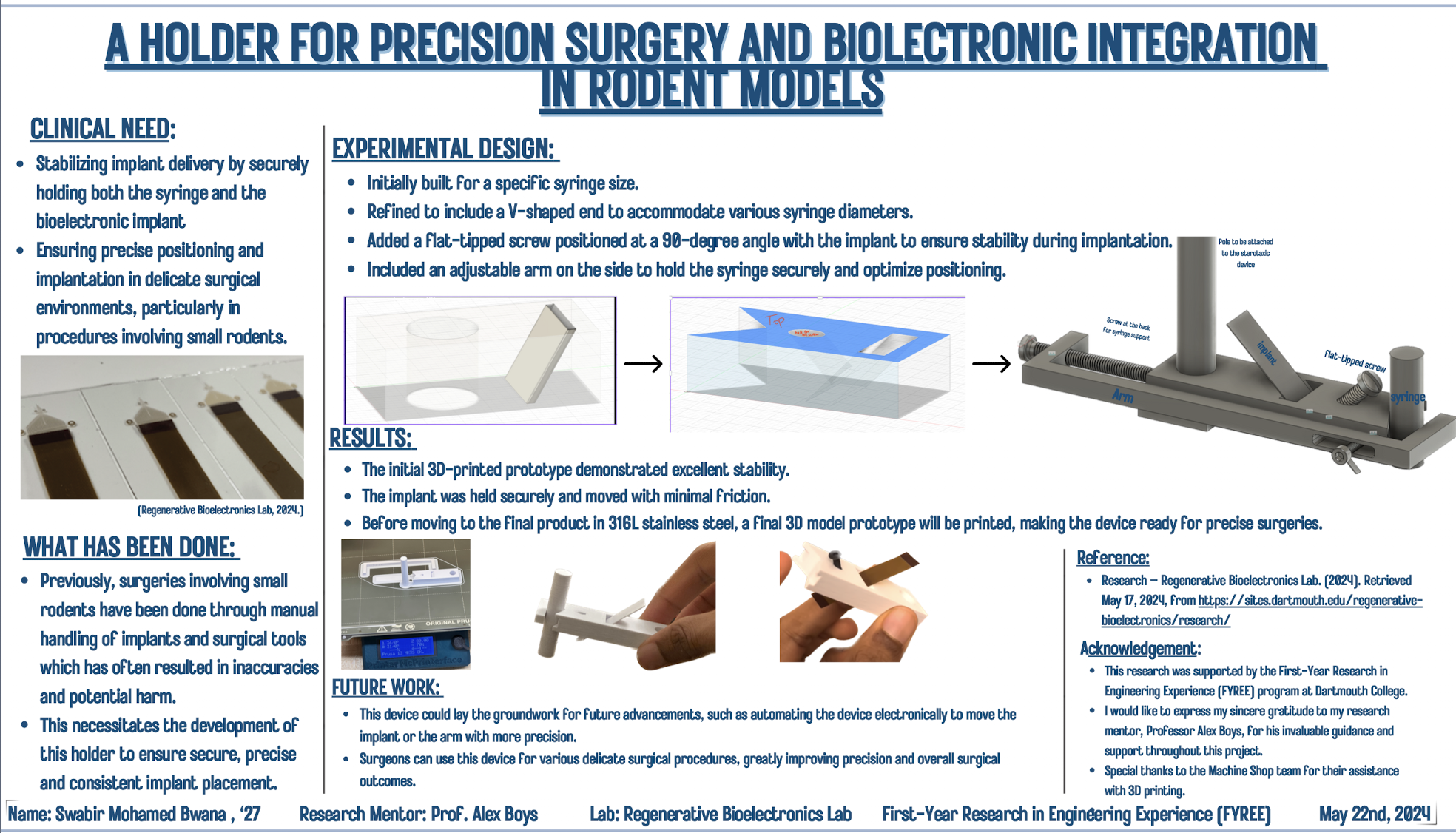
Published Paper
2027
Expected Grad.

Dartmouth College • Class of 2027
Engineering Sciences + CS — Software & Embedded
scroll